Tutorial Arduino - Radar giratorio con LCD

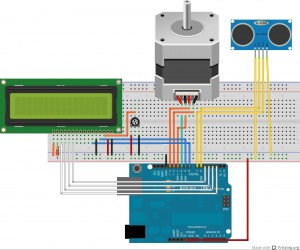
El siguiente montaje tiene una dificultad superior a todos los anteriores. Vamos a usar:
- LCD
- HC-SR04 (sensor ultrasónico)
- M35SP-9 (motor paso-paso) o un servomotor
- Soldador y alicates
MONTAJE:
VÍDEO DE FUNCIONAMIENTO:
[youtube=http://www.youtube.com/watch?v=0XQ90UGqRHY&w=770]
MODIFICACIÓN AL STEPPER:
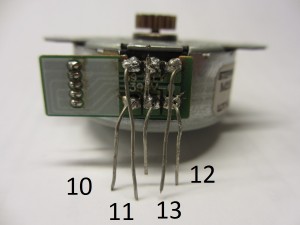
Soldamos patillas a los bornes para pincharlas en protoboard.
Para saber el orden en que debemos conectar los polos de nuestro motor prodecemos de la siguiente forma:
- Conectamos gnd al negativo de una fuente de alimentacion.
- Vamos probando con el positivo en los distintos pines hasta que consigamos que avance sin retroceder al tocar alguno de ellos.
MODIFICACIÓN AL HC-SR04:
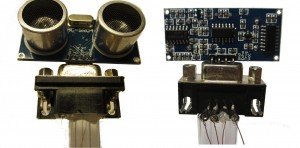
Lo más cómodo es utilizar un conector VGA.
Utilizamos conectores más finos para el sensor ya que el motor paso a paso no tiene suficiente fuerza para vencer la fuerza de unos cables gruesos.
CÓDIGO:
//Variables LCD #include LiquidCrystal lcd(9, 8, 5, 4, 3, 2); //Variables ULTRASONIDOS #include "Ultrasonic.h" Ultrasonic ultrasonic(6,7); int dist; //Variables STEPPER int DelayTime=50; int MP[] = {10, 11, 12, 13}; int n=0; int NP; int i; //DIBUJOS DEL LCD+++++++++++++++++++++++++++++++++++++++++++++++++ byte CERO[8] = { B00000, B00000, B00000, B00000, B00000, B00000, B00000, B00000 }; byte UNO[8] = { B00000, B00000, B00000, B00000, B00000, B00000, B00000, B11111 }; byte DOS[8] = { B00000, B00000, B00000, B00000, B00000, B00000, B11111, B11111 }; byte TRES[8] = { B00000, B00000, B00000, B00000, B00000, B11111, B11111, B11111 }; byte CUATRO[8] = { B00000, B00000, B00000, B00000, B11111, B11111, B11111, B11111 }; byte CINCO[8] = { B00000, B00000, B00000, B11111, B11111, B11111, B11111, B11111 }; byte SEIS[8] = { B00000, B00000, B11111, B11111, B11111, B11111, B11111, B11111 }; byte SIETE[8] = { B00000, B11111, B11111, B11111, B11111, B11111, B11111, B11111 }; byte OCHO[8] = { B11111, B11111, B11111, B11111, B11111, B11111, B11111, B11111 }; //+++++++++++++++++++++++++++++++++++++++++++++++++++++++ void setup() { lcd.createChar(0,CERO); lcd.createChar(1,UNO); lcd.createChar(2,DOS); lcd.createChar(3,TRES); lcd.createChar(4,CUATRO); lcd.createChar(5,CINCO); lcd.createChar(6,SEIS); lcd.createChar(7,SIETE); lcd.createChar(8,OCHO); lcd.begin(16, 2); //pines del stepper pinMode(10, OUTPUT); pinMode(11, OUTPUT); pinMode(12, OUTPUT); pinMode(13, OUTPUT); } void loop() { //GIRA HACIA UN LADO for(i=0;i<16;i++){ while (n<4){ NP=MP[n]; digitalWrite(NP,HIGH); delay(DelayTime); digitalWrite(NP,LOW); delay(DelayTime); n+=1; //lectura ultrasonido dist=ultrasonic.Ranging(CM); //imprime byte if (dist<10) lcd.print(" "); if ((10<dist)&&(dist<25)) lcd.write(1); if ((25<dist)&&(dist<50)) lcd.write(2); if ((50<dist)&&(dist<100)) lcd.write(3); if ((100<dist)&&(dist<150)) lcd.write(4); if ((150<dist)&&(dist<250)) lcd.write(5); if((250<dist)&&(dist<350)) lcd.write(6); if((350<dist)&&(dist<400)) lcd.write(7); if (dist>400) lcd.write(8); //el cursor se desplaza a la derecha lcd.setCursor(i,0); } n=0; } //GIRA HACIA EL OTRO LADO for(i=0;i<16;i++){ while (n>-1){ NP=MP[n]; digitalWrite(NP,HIGH); delay(DelayTime); digitalWrite(NP,LOW); delay(DelayTime); n-=1; //lectura ultrasonido dist=ultrasonic.Ranging(CM); //imprime byte if (dist<10) lcd.print(" "); if ((10<dist)&&(dist<25)) lcd.write(1); if ((25<dist)&&(dist<50)) lcd.write(2); if ((50<dist)&&(dist<100)) lcd.write(3); if ((100<dist)&&(dist<150)) lcd.write(4); if ((150<dist)&&(dist<250)) lcd.write(5); if((250<dist)&&(dist<350)) lcd.write(6); if((350<dist)&&(dist<400)) lcd.write(7); if (dist>400) lcd.write(8); //el cursor se desplaza a la derecha lcd.setCursor(i,0); } n=3; } }
