Ultra-Fast, el robot que atrapa objetos en el aire
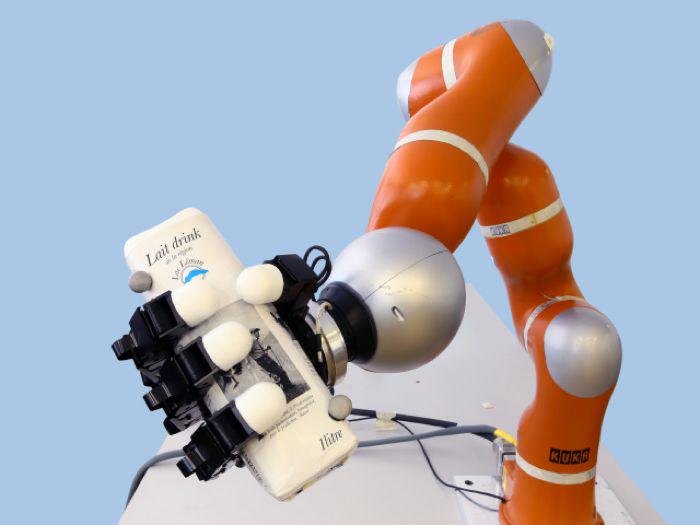
Con su palma abierta, el robot está completamente inmóvil. Una fracción de segundo después, de repente atrapa todo tipo de objetos voladores lanzados en su dirección: una raqueta de tenis, una pelota, una botella.
Ultra-fast es un robot desarrollado por investigadores de la Escuela Politécnica Federal de Lausana (Suiza) que es capaz de reaccionar en el momento y coger objetos en menos de cinco centésimas de segundo. Ha sido programado en el aprendizaje de Algoritmos y Laboratorio de Sistemas de la EPFL (LASA) y diseñado para probar soluciones robóticas para la captura de objetos en movimiento. Tiene un brazo que mide unos 1,5 metros y suele estar en posición vertical. Cuenta con tres articulaciones y una mano sofisticada con cuatro dedos. Es único en su tipo, ya que tiene la capacidad de atrapar proyectiles de diferentes formas irregulares en dos centésimas de segundos.
"Los robots están cada vez más presentes en nuestra vida cotidiana. Necesitamos máquinas que no sólo sean capaces de reaccionar en el acto, sino que también puedan predecir la dinámica del objeto en movimiento y generar un movimiento en la dirección opuesta", dice Aude Billard, directora del LASA.
[youtube=https://www.youtube.com/watch?v=M413lLWvrbI?w=770]
La capacidad de captar las cosas en el aire requiere la integración de varios parámetros. Ultra-fast logra reaccionar ante los acontecimientos imprevistos en un tiempo récord. “Los robots de hoy están a menudo preprogramados y no pueden asimilar rápidamente los cambios de datos, por tanto, su única opción es volver a calcular las trayectorias, lo que requiere mucho tiempo, y en algunas en situaciones cada fracción de segundo puede ser decisiva".
Imitación
Para obtener la velocidad y la capacidad de reacción deseada, los investigadores de LASA se inspiraron en la forma en que aprenden los seres humanos: por imitación y el método de ensayo y error. Esta técnica, llamada programación por demostración, no da instrucciones específicas al robot, lo que hace es mostrar ejemplos de posibles trayectorias. Consiste en guiar manualmente el brazo al objetivo proyectado y repetir el ejercicio varias veces.
La investigación se realizó con una pelota, una botella vacía, una botella medio llena, un martillo y una raqueta de tenis. Se seleccionaron estos cinco objetos ya que ofrecen una variada gama de situaciones en las que la parte del objeto que el robot tiene que tomar (el mango de la raqueta, por ejemplo) no se corresponde con su centro de gravedad. El caso de la botella incluso ofrece un desafío adicional dado que su centro de gravedad se mueve varias veces durante su trayectoria. Cuando se proyectan en el aire, todos estos elementos hacen aún más complejos los movimientos, a menudo con varios ejes. Lo que hace que los resultados sean bastantes interesantes.
En la primera fase de aprendizaje, los objetos son lanzados varias veces en la dirección del robot. A través de una serie de cámaras situadas a su alrededor, el robot crea un modelo para la cinética de los objetos en función de sus trayectorias, velocidades y el movimiento de rotación. Los científicos lo traducen en una ecuación para que el robot pueda posicionarse rápidamente en la dirección correcta cada vez que se lanza un objeto. Durante los pocos milisegundos del enfoque, redefine y corrige la trayectoria para una captura en tiempo real y de alta precisión. Esta eficiencia se mejora aún más gracias al desarrollo de controladores que sincronizan los movimientos de la mano y los dedos.
Fuente: EPFL